自动驾驶的实现,首先依赖感知传感器对道路周边环境信息进行采集,包括摄像头、激光雷达、毫米波雷达和超声波等,采集的数据传输出到中央计算单元进行计算,用来识别车辆周边障碍物和可行驶区域,进行路线规划和控制,最后制定方向盘转角和速度等信息,传输到底盘执行机构,按照指令进行精确执行。
在整个控制过程中,底盘执行机构的功能要完善,系统响应和精度要高。如果把自动驾驶车辆比作人,那么底盘执行机构就是我们通常意义上的手和脚,用来做控制执行,是自动驾驶控制技术的核心部件,这对整个底盘系统的要求非常高。
最直观的体现,便是用于控制车辆方向的线控转向。自动换道在避险回退过程中,常常出现回退过度甚至偏出本车道导致不安全,继而系统又通过较大的回调力矩将车辆拉回车道中央。在自动驾驶中或驾驶员控制换道过程中,驾驶员缓慢施加力矩进行方向盘控制时,容易出现系统抢夺方向盘。
这些切实存在的问题,严重影响自动驾驶控制精度,延长落地的时间。对于自动驾驶而言,需要结合实际存在的问题给出相应的解决方案,不断协调线控底盘和控制器之间的交互问题,改进线控底盘技术,这无疑会大大促进线控底盘的技术。
无疑,线控底盘是自动驾驶的必要条件。
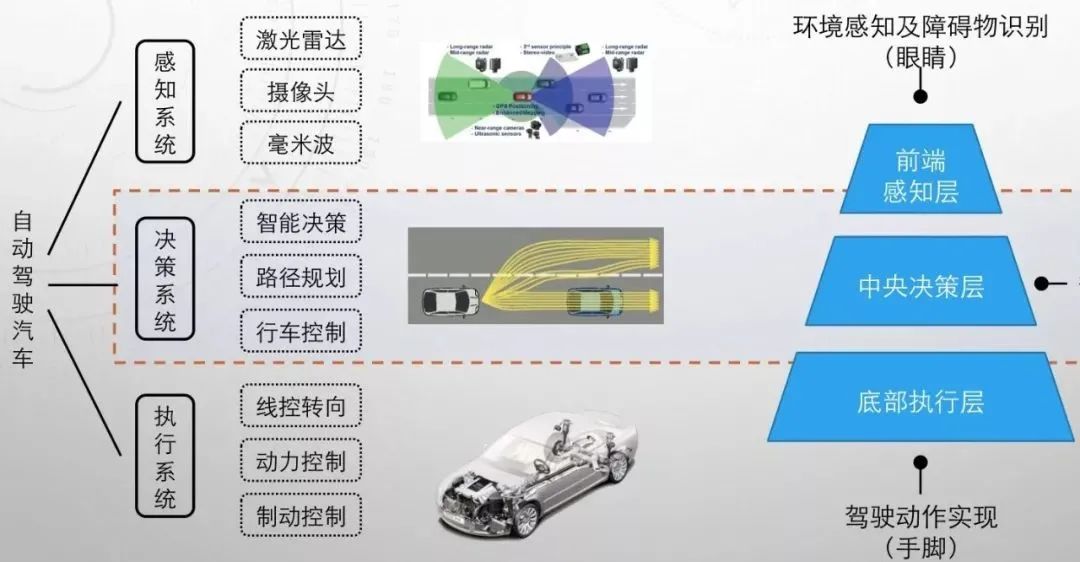
智能汽车的简单系统架构
同样,智能化、大数据网联化给线控底盘发展带来新的契机。
其一,智能汽车需要大量的、精确的底盘系统信号。而种类繁多的底盘传感器,信号模式和处理方法各异,且大量传感器信号汇入控制器对信号实时处理提出更高要求,因此亟须研究新型底盘域控制器,对多源传感器信号实时处理、校验与解算理论。
其二,智能汽车直接前馈预瞄控制需要精确的车辆模型,逼近真实车辆动力学状态。而底盘车辆及轮胎动力学呈现复杂非线性特性,因此亟须深入研究车辆复杂动力学模型精确解算机制,促进智能汽车的动力学应用发展。
其三,智能汽车在复杂场景下需要精度的感知状态,保证驾驶员视角。因此亟须研究复杂交通场景下底盘动力学域控制对车辆动力学状态的精确感知与预瞄技术,探索车辆运行动力学稳定边界精确量化机制,消除高复杂、动态交通环境的不确定性。
无疑,自动驾驶是线控底盘的充分条件。
线控技术(X-By-Wire)源于飞机的控制系统,其将飞行员的操纵命令转化成电信号通过控制器控制飞机飞行。
线控汽车采用同样的控制方式,可利用传感器感知驾驶人的驾驶意图,并将其通过导线输送给控制器,控制器控制执行机构工作,实现汽车的转向、制动、驱动等功能,从而取代传统汽车靠机械或液压来传递操纵信号的控制方式。
线控底盘主要有五大系统,分别为线控转向、线控制动、线控换挡、线控油门、线控悬挂。从执行端来看,线控油门、线控换挡、线控空气悬挂虽然技术都很成熟了,但最为关键的转向和制动系统目前还没有一套可以适用于L4驾驶的稳定的量产产品。
汽车底盘线控技术特征如下:
线控转向,即Steer-By-Wire,能够无束缚地得到无人驾驶进行转弯的指令目标输入和汽车的转向轮的变化之间的关系,可以控制转向机构和行驶需要之间的关系,这样能够对车辆进行调节。其直接掌控着自动驾驶路径与方向的精确控制。
3.1. 线控转向发展历程
自1894年乘用车安装第1款现代意义上具备方向盘的转向系统开始,其转向系统大致经历了5个阶段:
3.1.1. 电子液压助力转向(EHPS)
驾驶员在方向盘上施加转动力矩和角度;
方向盘带动转向柱转动;
转向柱通过其底部和转向机相连的齿轮齿条机构,将转向柱的转动变为转向机齿条的横向直线运动;
转向扭矩传感器检测到驾驶员输入了方向盘扭矩;
根据驾驶员输入的扭矩,以及车速等信息,ECU计算并控制电动机带动转向助力泵转动,产生高压液体;
液压通过转向油管传递到液压助力转向机上,液压推动液压助力转向机上的双作用液压缸的活塞,产生压力,对齿条的横向直线运动进行助力;
转向机两端的转向横拉杆,通过推动或拉动转向节来改变车轮的方向;
车轮与地面间产生横向力,车辆转向。

电子液压助力转向机构
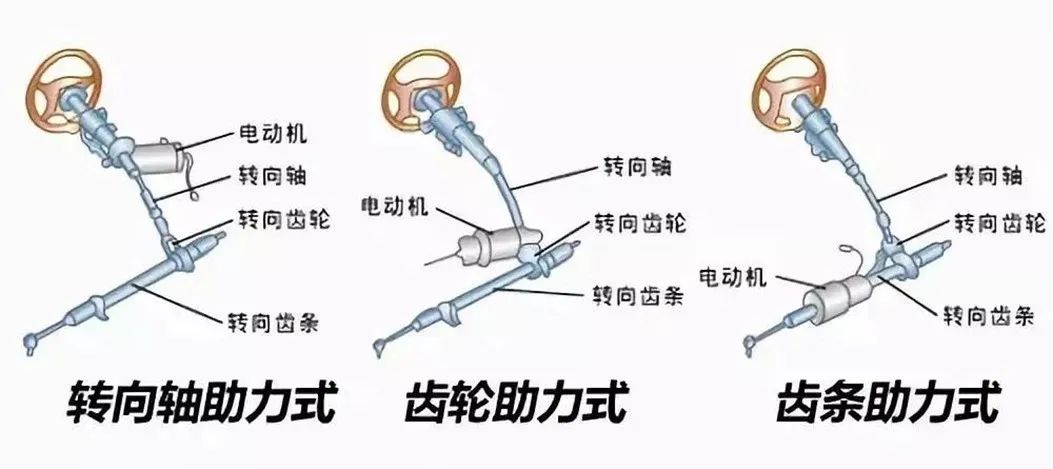
3.1.2. 电动助力转向(EPS)
第一种是对转向柱的转矩进行助力,这种叫C -EPS (Column - EPS);
第二种是对转向柱底端的齿轮齿条机构中的齿轮进行助力,这种叫P - EPS(Pinion - EPS);
第三种是在转向机上对齿条的直线运动进行助力,这种叫R - EPS(Rack - EPS);而R - EPS根据传动的方式不同,又可以分为R-EPS,DP-EPS(双小齿轮EPS)和BD-EPS(带传动EPS)。
3.1.3. 线控转向(SBW)
狭义上说,SBW系统特指没有机械连接的转向系统,这是从系统的结构上进行的一个区分。但着眼于功能,从广义说,任何能够将驾驶员输入和前轮转角解耦的转向系统都可以看成是 SBW系统。在此定义下,一般结构如下图。
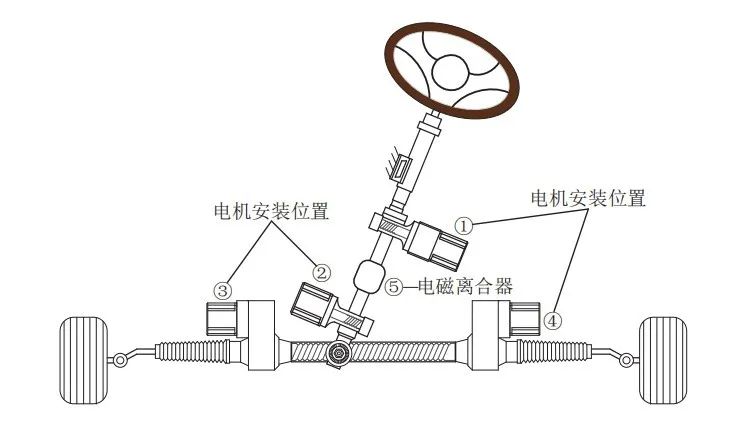
其中① - ④为电机可能安装位置,而⑤为电磁离合器。电磁离合器提供机械冗余,可实现转向盘与车轮的机械解耦。根据有无⑤,SBW系统可以分为保留机械软连接的 SBW系统和无机械连接的 SBW系统2大类。由此,人们研究双电机安全冗余线控转向系统。该方案包括转向操纵机构、转向执行机构、电子线传控制网络、电源系统和各种辅助结构。该方案将传统的机械转向与电子控制技术紧密结合起来,线传主动转向与机械操纵转向两种模式通过电磁离合器可任意切换,而且通过故障识别,机械操纵转向可以作为线传主动转向备份,提升安全性。
3.2. 线控转向主要研究内容
当前,线控转向系统的研究主要集中在 3 个方面:路感反馈控策略研究、转向执行控制策略研究以及故障诊断与容错控制策略研究。
3.2.1. 路感反馈控制策略研究
由于线控转向系统取消了方向盘和转向车轮之间的机械连接,通过转向角信号和转向电机控制车轮转向,导致路感无法直接反馈给驾驶员,这从驾驶安全性角度考虑是绝对不允许的。
针对这个问题,线控转向系统的方向盘总成中包含有路感模拟电机,用来产生作用于方向盘的阻力矩以模拟路感。路感是一个比较抽象的定义,其定义之一是指驾驶员通过方向盘得到的车辆行驶中的转向阻力矩,该阻力矩主要包含回正力矩和摩擦力矩2部分。其中,回正力矩是使车轮恢复到直线行驶位置的主要力矩之一,其数值的确定是车辆设计中的一个难题,通常由经验、半经验、统计或实验的方法获得。回正力矩与车辆前轮的受力状态存在直接关系,而前轮受力又和车辆实时的运动状态及路面附着直接相关。因此,通常把总的回正力矩除以自方向盘到前轮总的力传动比近似得到的方向盘手力矩看成是路感。
就当前的研究来看,路感通常采用基于经验设计和基于模型设计这2种方法获得。
基于经验设计的方法,通常是将路感设计为方向盘转角、车速、横摆角速度等参数的非线性函数关系式,在不同条件下为驾驶员提供不同的路感,简单高效,但是自适应性和精度较差。
基于动力学模型的方法,是通过参考传统车辆路感产生的动力学原理建立相关的动
力学模型,根据车辆的动态响应、驾驶员的方向盘输入等计算与路感相关的轮胎力、摩擦力矩等,最终计算出路感。获得期望的转向阻力矩,剩下的工作就是控制路感反馈电机达到期望的力矩。最常用的算法是PID算法。
3.2.2. 转向执行研究
SBW系统的转向执行控制策略可以分为上层策略和下层策略。
其中,上层策略根据当前车辆的状态和驾驶员的输入,在尽量满足控制目标和约束条件的情况下,计算出期望的前轮转角;而下层策略则是由转向控制器控制转向电机执行该指令,快速、准确地达到该目标转角。
由于线控转向系统的灵活性,衍生出很多控制算法。总体而言,算法可以总结为基于经验设计的方法和基于动力学模型计算的方法这 2 大类。
基于经验设计的方法主要是根据车辆在不同工况下对操纵稳定性要求的不同来进行设计。在低速工况下,汽车应具有不沉重而适度的转向盘力与不过于大的方向盘转角,还应具有良好的回正性能;高速、低侧向加速度工况下,汽车应具有良好的横摆角速度频率特性、直线行驶能力、回正性能和较大的转向灵敏度,且转向盘力不宜过小而应维持在一定数值,以给驾驶者稳定的路感。
基于动力学模型计算的方法旨在提高车辆的稳定性。因此,也有研究人员将这种方法归结为车辆稳定性控制方法。其基本思路是根据当前车辆状态、外界环境和驾驶员输入提出控制目标,然后根据控制目标计算参考前轮转角,控制前轮转角改变轮胎侧向力,对横摆力矩进行补偿。
3.2.3. 故障诊断与容错控制
在线控转向中,转向的动力来源于电机主要包括了两方面:用来给驾驶员提供转向时的路感和动力。电机的可靠性是研究者们首先要考虑的因素,电机和控制器的容错就体现得十分重要。实时监测技术和设置冗余硬件是保证控制器稳定运行的两种手段,故而可以实现容错控制,线控转向的运行的品质得到了保证,根据控制器与电机之间的控制关系,可以对电机出现故障时所需要的补偿控制进行相关研究,那样就为能够在最大限度上保证线控转向的可靠性提供了可能。
3.3. 线控转向的应用
从全球竞争格局来看,博世、采埃孚、捷太格特、NSK、耐世特等国际巨头有成熟的线控转向产品和技术,但在商业化方面仍然遇到了瓶颈。

2020年以后,L3级自动驾驶进入量产将拉动线控系统产品商业化,那些率先在中国市场布局的外资企业会有先发优势。纵观国内市场,在线控技术上有所作为的中国本土企业寥寥无几,且规模相对较小。
线控制动,即Brake-By-Wire,在线控底盘技术中是难度最高的,但也是最关键的技术。线控制动系统掌控着自动驾驶的底盘安全性和稳定控制,只有拥有足够好的制动性能(包括响应速度快、平顺性好等),才能为我们的安全提供良好保障。
4.1. 线控制动发展历程
乘用车的线控系统自威廉·迈巴赫于1900 年发明鼓式制动器起,至今已有120年的历史,期间诞生了多种形式的制动系统,其发展大致可以划分为以下5 个阶段:
采用人力的纯机械制动和液压制动系统;
兼用人力和发动机动力作为制动力源的伺服制动系统;
发动机提供所有制动力源的动力制动系统;
以ABS、TCS、ESC等为代表的成熟的电液制动系统;
以电子驻车制动系统 (electric parking brake, EPB)、电控液压制动 (electric hydraulic brake, EHB)、电子机械制动系统 (electric mechanical brake, EMB) 等为代表的 BBW系统。
4.1.1. 电子驻车制动系统(EPB)
驾驶员拉起EPB开关;
EPB控制器接收到指令,控制制动卡钳上的Actuator中的电机,电机通过传动机构推动Spindle;
Spindle推动活塞,产生压力,将摩擦片压紧到制动盘上;
摩擦片在垂直压力下,和制动盘间产生静摩擦力,保持车辆静止。

电子驻车制动系统
4.1.2. 电控液压制动系统(EHB)
EHB 没有了真空助力器,结构更简单紧凑;电动驱动,响应也更加迅速;方便实现四轮制动分别控制;容易集成ABS (Anti-lock Braking System), TCS (Traction Control System) 以及 ESC (Electric Stability Control)等辅助功能,兼容性强;踏板解耦,能够主动制动以及能量回收。EHB系统仍保留了传统的液压管路部分,是电子和液压相结合的产物。
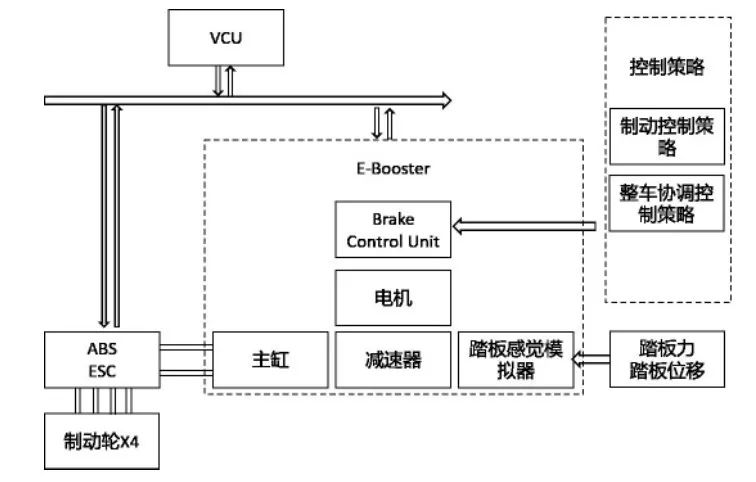
典型带有E-Booster的EHB系统如图所示。踏板位移和踏板力经电子传感器传导给电子 ECU,然后经过不同的助力形式,如电动液压泵高压蓄能器或者直流电机等推动建立起液压,液压再分配给四个制动轮缸。
工作过程为:
驾驶员踩下制动踏板,输入机械力;
E-Booster通过电机和泵对驾驶员的输入进行助力(boost);
制动主缸将驾驶员的输入力和E-Booster的助力转化成制动系统液压;
主缸液压通过制动硬管和软管传递至每一个车轮的制动卡钳轮缸;
液压推动轮缸的活塞,产生压力,将摩擦片压紧到旋转的制动盘上;
摩擦片在垂直压力的作用下,产生摩擦力和制动力矩,对整车进行制动。
电控液压制动系统
4.1.3. 电子机械制动系统 (EMB)
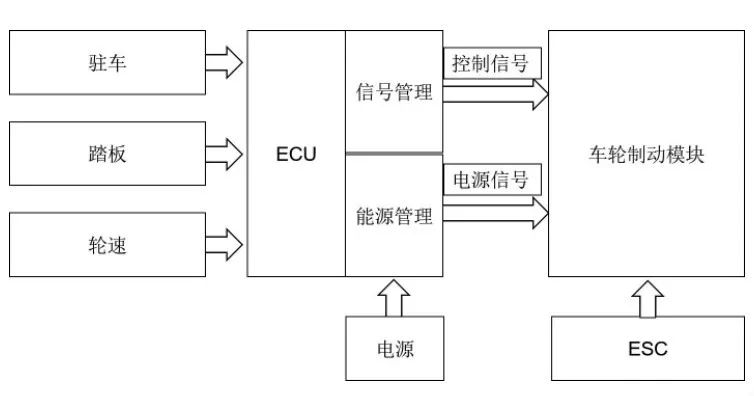
电子机械制动 EMB 系统结构显得更简洁了,取消了制动系统的液压备份部分,踏板信号与执行器之间完全靠电子信号传输,与 ABS、TCS、ESC 等模块配合实现车辆底盘的集成控制, 是真正的线控制动系统。EMB 结构精简,能够降低整车质量,易于维护,便于安装调试;完全解耦,制动响应更加迅速;便于底盘域控制及智能驾驶技术发展。
踏板信号以及车辆信号首先传导到 ECU,决策后再向4个车轮制动模块发出制动指令。车轮制动模块上的电机驱动制动摩擦材料块,然后实现摩擦制动。每一个车轮都有一个制动模块,可以单独分别控制,每个模块的驱动电机也都有单独的电机控制器。4个模块作用下,实现制动力分配,制动稳定性控制等功能。
电子机械制动系统
4.2. 线控制动主要研究内容
当前,线控制动系统的研究主要集中在 3 个方面:踏板模拟、主动制动和制动能量回收。
4.2.1. 踏板模拟
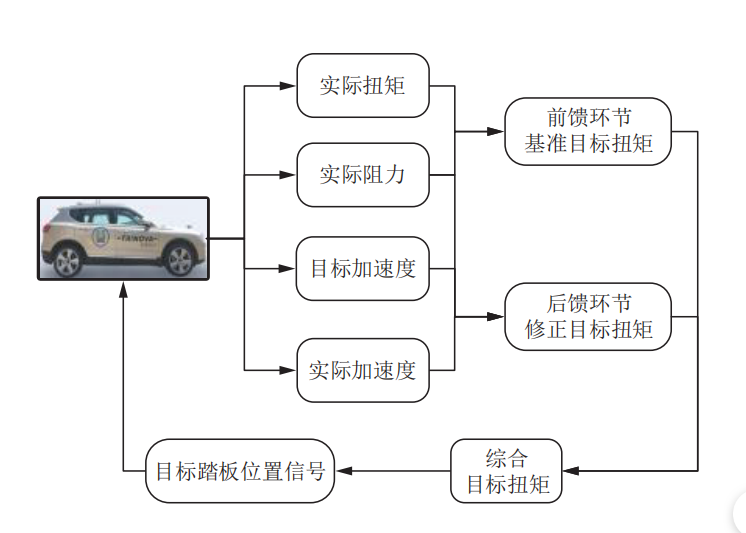
BBW系统取消了踏板和主缸之间的机械连接,踏板力需要用通过模拟器或算法模拟的方式提供给驾驶员,踏板力模拟的好坏决定了 BBW系统品质的优劣。目前主要的研究集中在实验方法,一般是通过对大量的实验数据进行分析归纳,得到踏板力与踏板行程和车辆状态之间的关系,通过弹簧或作动器对踏板力进行模拟。
4.2.2. 主动制动
上层策略根据当前车辆状态和驾驶员操作,向 BBW系统发出制动请求,BBW系统则需要准确、快速地响应这个请求。主动制动旨在提高车辆的稳定性和安全性,高级驾驶辅助系统(ADAS)、紧急制动系统 (AEB)及自动驾驶等都使用到了这一功能。目前,所有关于主动制动的研究基本分为基于经验设计的方法和基于动力学模型计算的方法。几乎所有常见的控制算法都可以其中找到应用,如PID算法、最优控制、鲁棒控制、滑模控制、模糊控制、神经网络控制、模型预测控制。
4.2.3. 制动能量回收
制动能量回收系统的中协调分配电制动力矩和制动力矩是关键技术之一, 控制策略的研究基本围绕这一点展开。
4.3. 线控制动系统应用

目前 EHB 有着不同的实现形式,按照是否集成ESC、ABS 等功能的一体化形式,分为 One-Box 形式和 Two-Box 形式。One-Box 为EHB集成了ABS/ESP,只有一个ECU。而Two-Box需要协调EHB ECU和ESP ECU的关系。
线控驱动,即Throttle-By-Wire,作为最成熟的线控技术之一,可通过直接扭矩通讯、伪油门安装、节气门调节等方法实现。针对开放发动机和电机扭矩通信接口协议的车辆,线控驱动控制器直接通过控制器局域网络 (CAN) 向发动机或者电机发送目标扭矩请求,实现整车加速度控制。此种方案无需进行机械改装,结构简单可靠。
针对不开放扭矩通信接口协议的车辆,安装节气门调节机构或者伪油门也可实现线控驱动功能。控制器根据车辆状态、加速踏板开度及其变化速率,利用内部算法程序预判驾驶员需求功率或转矩,然后通过电信号控制执行电机的动作,调节发动机节气门开度,进而改变发动机输出扭矩和功率。
[1]李亮, 王翔宇, 程硕, et al. 汽车底盘线控与动力学域控制技术[J]. 汽车安全与节能学报, 2020(2).[2]宗长富, 李刚, 郑宏宇, et al. 线控汽车底盘控制技术研究进展及展望[J]. 中国公路学报, 2013, 26(002):160-176.[3]张亮修 , 吴光强 , 王宇 .车辆纵 - 侧 - 垂向动力学统一建模及实车验证 [J]. 机械工程学报 , 2019, 55(16): 114-122.